

軸振動に潜む魔物:自励振動
回転数と共振点
軸系には軸本体の、またローターやブレードといった各要素にはそれぞれの固有値が存在します。それぞれが特定の回転数で共振する性質を持つため、全体として見た時に多数の危険回転数が存在することになりますが、本当に害を及ぼすのはごく一部です。
すべての部品のすべての固有値を避けた設計は不可能だ。実際には十分な減衰が得られたり、加振力が小さい場合は共振周波数が一致しても問題はない。ここからはどのようにその評価を行うのかを見ていこう。
キャンベル線図
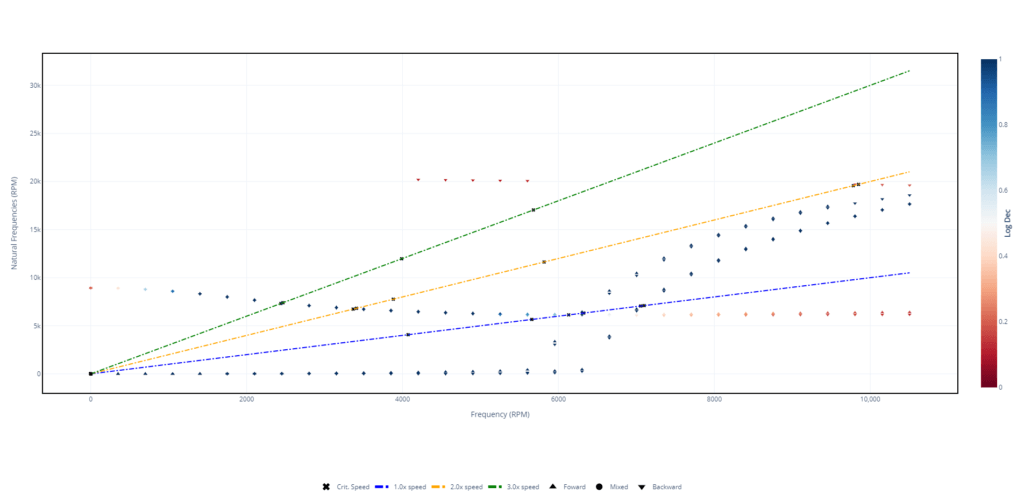
固有値と回転数を線図にし、共振する点を視覚化したものをキャンベル線図と言います。軸、そして各要素に対して描き、何次のモードがどの回転数で重なるか見極めるのに使用します。横軸は回転数、縦軸は固有周波数です。危険回転数に該当する部分は運転点から外すか、あるいは十分な減衰を与えて振幅を抑える工夫が必要になります。
軸の場合は最低1~3次が重なる回転数まで評価し、また翼などローターに複数枚取り付けられるものは、回転数x枚数x次数 の周波数まで評価が必要です。
翼の枚数が多かったり、回転数が高い機械では100kHzを超える評価が必要な場合もあります。
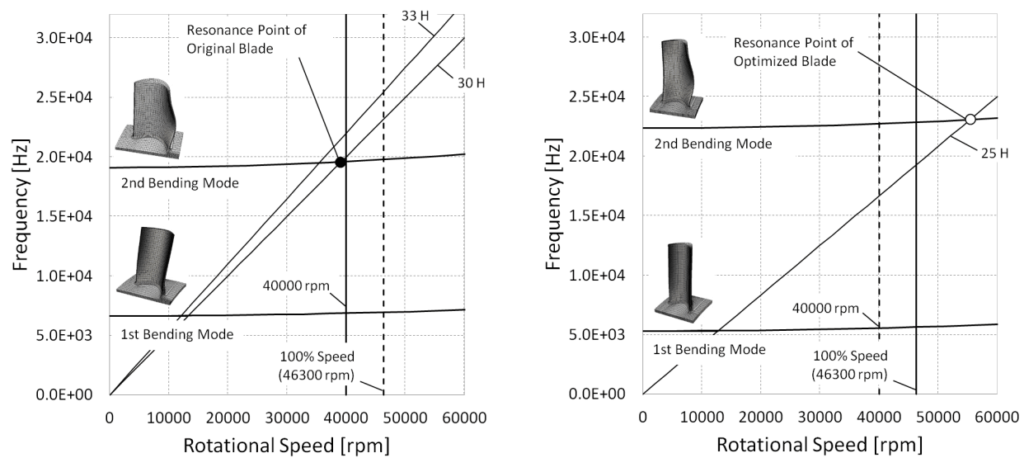
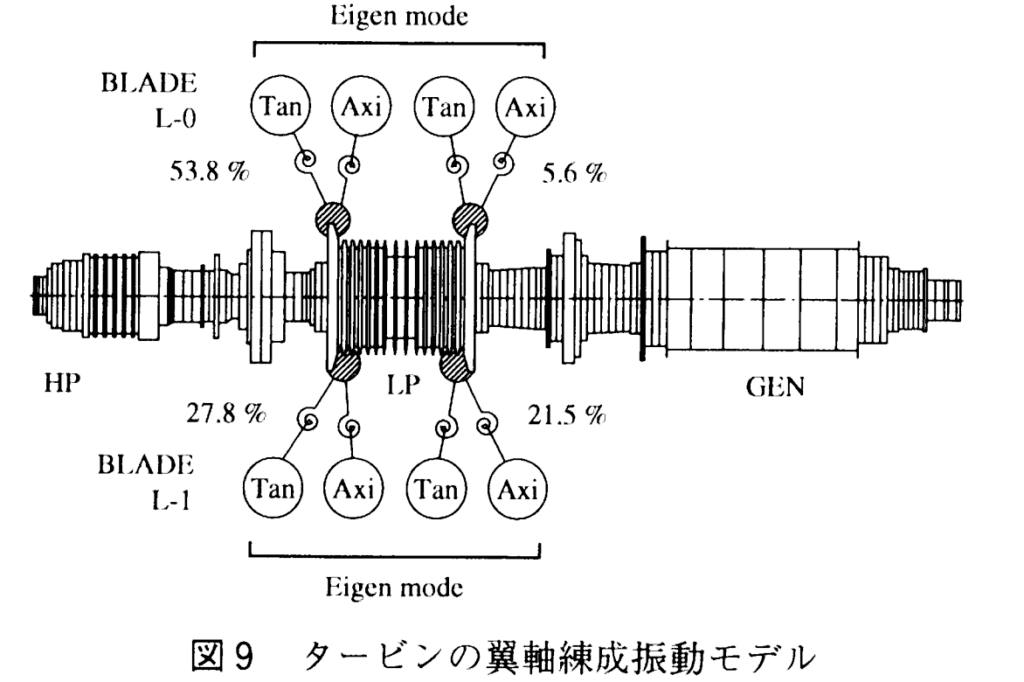
上図はLE-7 FTPのタービン翼の事例だ。図の左側のように運転速度 (46300rpm)よりも低いところに翼の一次と二次の共振点が存在する。一次は実運転ではほとんど使用されることがないため、一度この速度を通過してしまえば大丈夫だ。
しかし二次は運転回転数にかなり近いところにあり、翼の剛性が不足していると言える。これに対して翼形状の見直しを行ったものが右側のデザインで十分な共振に対するマージンが確保された。
これが設計評価におけるキャンベル線図の見方だ。是非覚えておこう!
クリティカルマップと減衰比
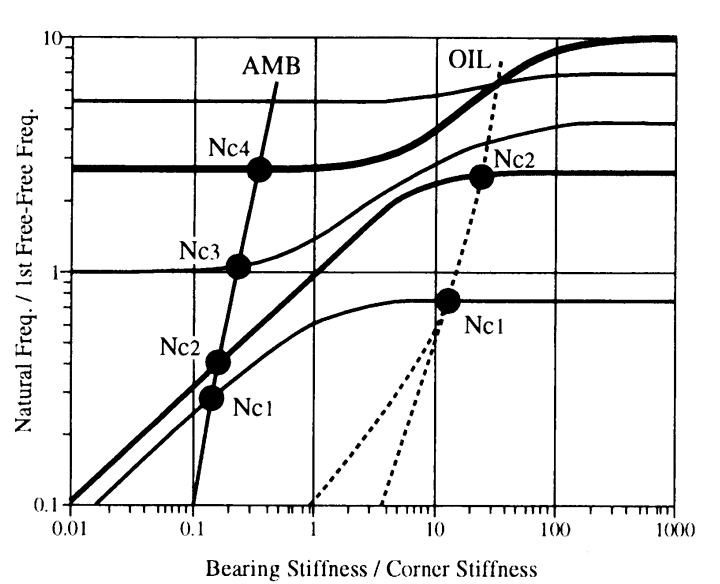
とある軸に対して軸受の剛性を変えた時の危険回転数を表した図がクリティカルマップです。横軸に軸受剛性、縦軸に固有値を示してあり、軸受選定において欠かせない図です。
例として点線で表したOILの線は油膜軸受で、剛性が高めの傾向にあります。この場合の一次、二次危険回転数がそれぞれNc1、Nc2と書かれたところにあり、軸自体の自由振動における固有値との周波数の割合で示されます。
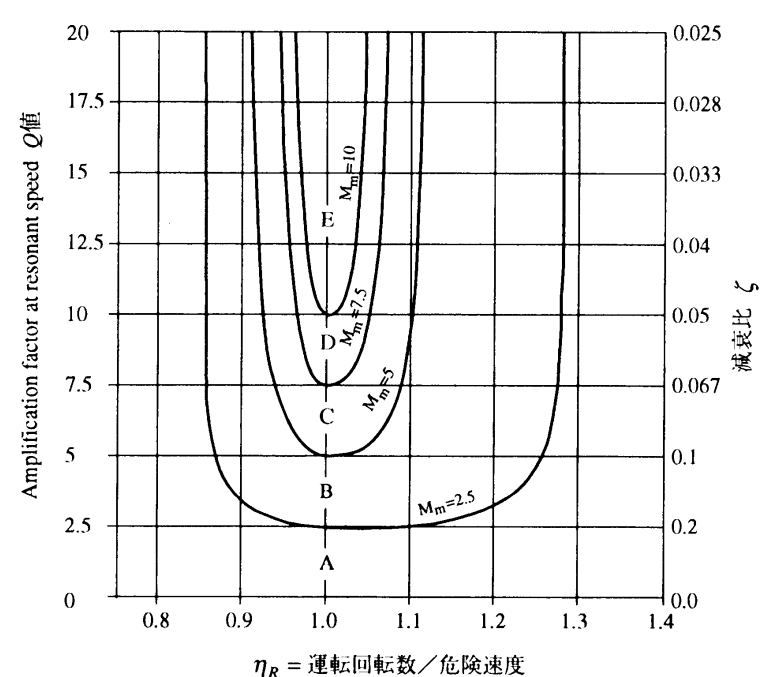
危険回転数付近で運転する場合、また始動時に危険回転数を通過する場合は、何かしらの減衰が無いと軸が過大な共振を起こしてしまいますが、どれほどの減衰を与えれば安全かを示したのが“Q値“と呼ばれる値です。Q値は減衰比の逆数になるため、低ければ低いほど十分な減衰が得られていると解釈されます。ISO上ではA~B領域では問題なく、C~Dは注意が必要、Eはあらゆる場合でも避けることを推奨しています。
自励振動
回転機にとって最大の恐怖は自ら発生させた力によって軸振動が発生し、それが増幅されてしまう自励振動です。代表的な物としては流体軸受に見られる”オイルホイップ”、シール部あるいは内部減衰の不安定化力起因の振動、タービンチップからの不均一な漏れ量で発生する”Thomas Force”起因の振動などです。自励振動が起こると、負の減衰のために時間と共に振動振幅が増大し制御不能になるという非常に危険な状態になります。
自励振動は様々な部品が練成して発生することが多く、解析では予想が難しいのも特徴です。有名なエアバスA220エンジン破損事故では“ブリード弁キャビティで発生する音響共鳴によって3段目低圧コンプレッサ翼が加振され、ローターを経由し軸より伝搬して1段目低圧コンプレッサ翼が励起され高サイクル疲労破壊に至る” というもはや練成に練成が重なり合って起きた不具合で、軸振動の怖さを物語っています。
https://www.accidents.app/summaries/accident/20190801X04456
私が知る限りでは、“そんなの無理だろーーー!”の殿堂入りするぐらい予測困難な不具合で、どれだけ解析をやっても試作では何かが起きる、試作試験をしていても製品では何かが起きることがある、といことを物語っています。
特に多段軸流コンプレッサやガスタービンで厄介なのは、コンポーネント単体では固有値(剛性)が高い場合でも、低周波の振幅は直接伝えてしまうため、固有値の低い部品が接続されている場合には振動が伝搬し、振幅励起されてしまうことがあることです。
軸の運動の計算方法
回転体の動きを体感するのに手っ取り早いのはベイブレードです。少し先の素材を変えたり、重りの配分を変えるだけで駒が全く違う動きをすることが分かります。
軸においても同じことが言えます。軸受や軸の剛性、重量物の重さや配置等、これらを数学的に解くことで、軸系の運動を予測することができます。
ローターダイナミクス解析
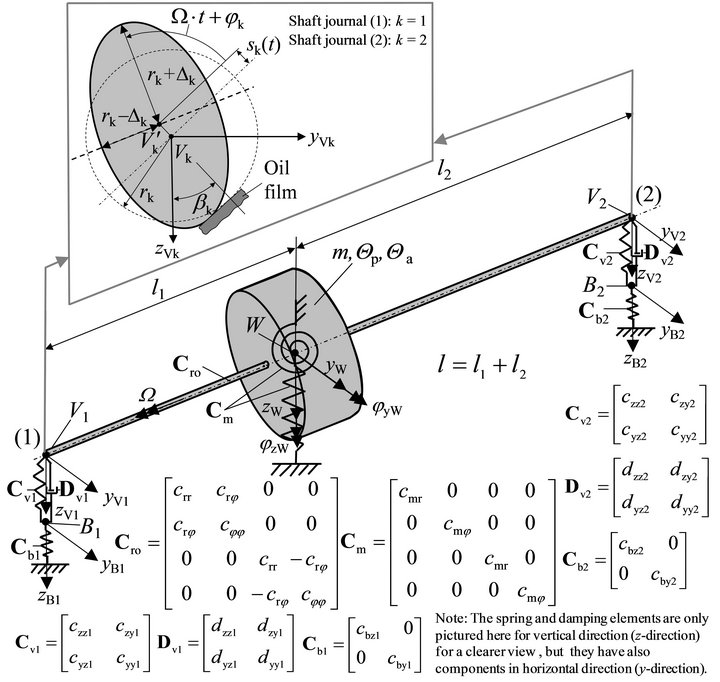
RD解析の具体的な計算は下記のような剛性行列を振幅応答に対して解いていく作業になります。
あーもうムリだわ
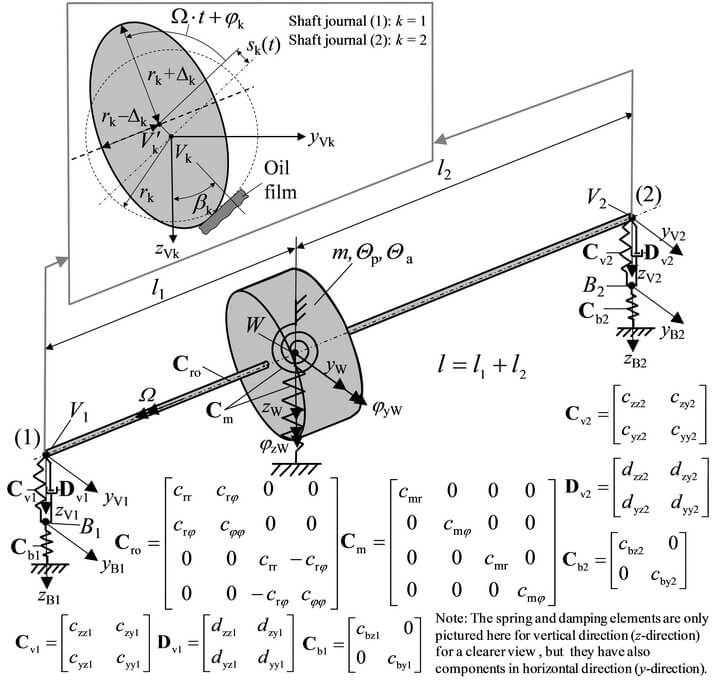
基本的な考え方は振動の計算と同じだが、軸という一次元的な長さを持つ要素と、回転するという点でが加わるんだ。(複素解析と代数の数学知識が無いと解けないため詳細はこの記事では割愛します。)
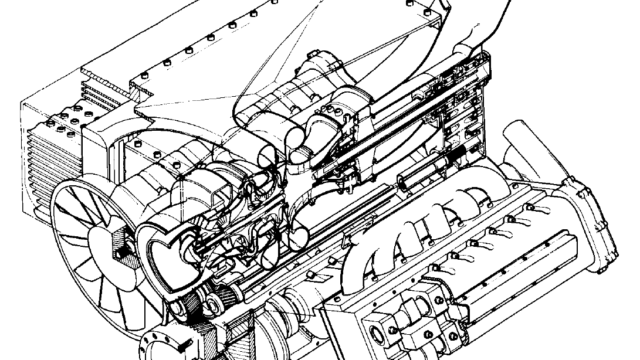
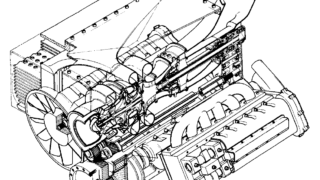
このような数式で表した軸系を元に計算を進めていくのがローターダイナミクス解析です。解析に用いるモデルを単純に“モデル”、解析作業をRD解析等と呼びます。解析モデルの一例:
非常に単純な軸系でも手計算でやるのは大変な労力がかかるため、プログラムで解くのが一般的です。それでもあえて一から理解したい、挑戦してみたい方には下記の教科書がおすすめです。
おすすめ教科書:
https://www.coronasha.co.jp/np/data/tachiyomi/978-4-339-04645-8.pdf
ジェフコットロータ
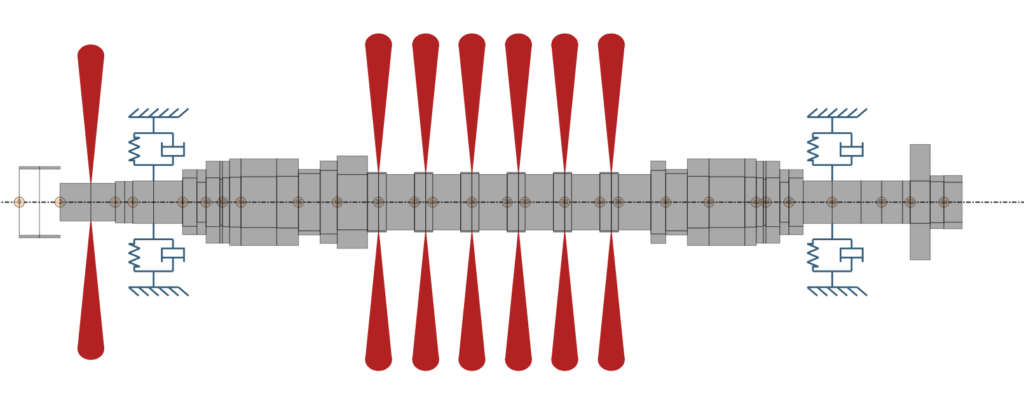
ここまで図で示したきた軸系は両端に軸受、真ん中にローターが配置された“ジェフコットロータ”と呼ばれる、軸系における最も基本形で解析が簡単なものになります。軸が剛体と考え他の力を無視した場合の軸受の固有値は√(k/m)と簡単に得られ、ジェフコットロータに限っては左右の軸受の特性が同等であれば固有値が簡単に算出されます。
試験や解析の容易性や基本特性が知られていることから、流体力等高度な作用力の影響を研究する際にはしばしば使用される形態です。

軸振動の回避
軸振動の診断
最終製品の段階で軸系すべての動きを計測するということは稀で、多くの場合軸受部等に設けた振動センサやローターの変形を検知するクリアランス計などで軸の運動を把握します。これらの値が計算狙い値を超えてしまっていた場合は、何かしらの対策が必要になり、最悪の場合は基本設計からやり直しになります。
次の動画は実運転状態での軸の状態把握に広く使用されている振動による異常検知の方法です。
トラブルの際は診断データからどのモードで共振し、何が原因かを探っていくことになる。そのためには精度の良い基本設計が出来ていないと、原因不明で迷宮入りしてしまうんだ。
作って、壊れたら改善する、という単純なサイクルでは完成させることができず、きちんとした基本設計が必須なのが回転機械が他の機械とは一線を画す点と言える。
設計における軸振動の回避
本日の話をまとめると、次のようになります!
万が一解析で見積もり切れなかった軸振動が出てしまった場合でも、詳細設計での変更が難しい部分のロバスト性が高い基本設計をしていけば対策も打ちやすくなります。
- 不釣り合いレベルが大きすぎる
- 減衰が不足している
- 軸あるいは軸受の剛性が不足している・過大である
- 外力が想定より大きい
- 部品同士の練成振動
- “危険回転数”での運転を避ける :これがベストプラクティスです
- 不釣り合いレベルを改善する
- ローター質量を軽くする
- 減衰を増やす:(軸受の見直し、ダンパーの追加、軸の熱処理変更など)
- 剛性を増やすか減らす:(軸/軸受径の変更、材質見直し、ケーシング再設計など)
- 支持点を増やす/減らす:(モードシェイプを変えてあげる:最終手段)
- 固有値評価対象の見直し (特に凹凸や周方向不均一性のあるものは要注意)
本日も読んで頂きありがとうございます!入門記事はここまでです。一夜で語るのにはなかなかボリュームが多く前提知識も多くなってしまうため、紹介程度の内容でしたが、RDの重要性や何が効いてくるのか、といった観点を理解してもらえたならば幸いです。
難しい理論は俺にはよく分からなかったけど、ようは軸が暴れる原因とその対策はこんな感じ!ってことなんだな。なんとなくは理解できたぜ
最近では様々な分野で機械学習を用いた設計手法や診断方法が登場しつつあるが、RDに関してはまだまだ発展途上で再現性の問題も多い。
所謂”感じニアリング”が通用しにくに分野でもあるからだ。きっちりと事象を把握して理論通りの計算をしないと、複雑な軸の動きは何も分からない、設計のためには必須だということだ。
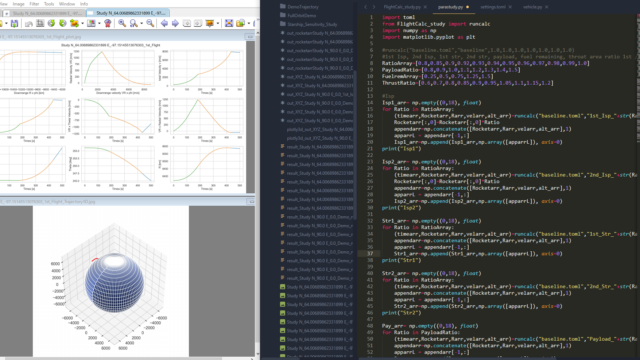
次回はRD解析を体験できるフリーソフトを紹介したいと思います。少し専門的な記事になりますが、簡単な数学だけで使うことができるので、今回はじめてRDを知った人も、百見は一試行にしかず!
ステップ・バイ・ステップで紹介する予定なので是非試してみてくださいね。
参考・クレジット
https://www.scirp.org/html/9-7401515/d29b0254-14e2-4d62-860f-b29106861694.jpg
https://www.cybernet.co.jp/ansys/glossary/rotordynamickaiseki.html
https://www.tire-fitter.co.jp/11593/
https://koyo.jtekt.co.jp/2020/01/column02-05.html
https://www.turbo-so.jp/turbo-kids1.html
https://www.jstage.jst.go.jp/article/tsj1973/28/3/28_3_129/_pdf
https://jaxa.repo.nii.ac.jp/?action=repository_uri&item_id=2525&file_id=31&file_no=1
https://www.kawaju.co.jp/rd/vibration-noise/report/rotary-machine.html












{kind=link}
[…] 【ターボ機械シリーズ③】 ローターダイナミクスとは回転するあらゆる機械に影響するローターダイナミクス。どのような分野で、どうして重要なのかを説明します。… […]
[…] 考にしてみてください。・【ターボ機械シリーズ③】 ローターダイナミクスとは […]
RD解析の自炊は勉強のために大変有効だと思います。2面バランサーを自作する際に参考させて頂きます!